Shortest Path Algorithms in GIS Route Planning
Posted on February 9, 2025 • 8 min read • 1,531 wordsShortest path algorithms in GIS for optimal routing. Explore graph theory & spatial data insights.

Navigating the Network: Understanding the Shortest Path Problem in GIS for Optimal Route Planning
Finding the most efficient route from point A to point B seems straightforward in our daily lives thanks to readily available digital maps. But behind the seamless user experience lies complex mathematics working tirelessly. This is where the shortest path problem, a cornerstone of both graph theory and geographic information systems (GIS), plays a key role. This post is dedicated to providing an understanding on how algorithms solve the shortest path problem, thus influencing how we move about our geospatial environments every single day.
Finding the Shortest Path
The shortest path problem isn’t just about choosing the quickest route between two addresses. It extends into areas crucial for geospatial analysis. Imagine city planners optimizing emergency services routes, delivery companies trying to cut travel times, and public transport engineers designing routes to connect the whole city as quickly and reliably as possible. The potential for impact using this relatively simple and well-known method is substantial and directly impactful.
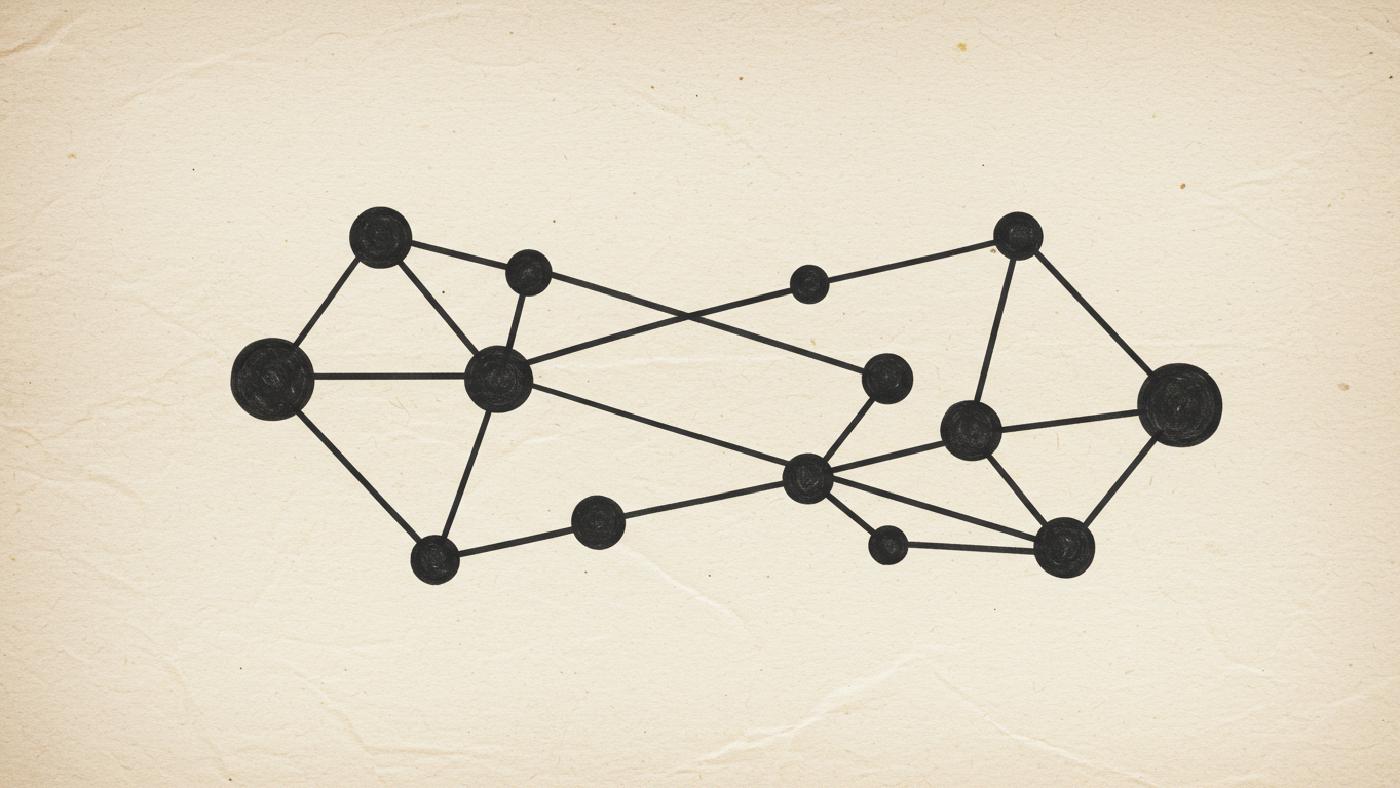
At a basic level, a geographic dataset can be structured in form of weighted graphs, consisting of nodes which can represent locations (e.g. intersections, addresses) and edges which are weighted to signify things such as distance and time for moving between locations (e.g. roads or waterways) .
Therefore the “shortest” distance needs to be carefully considered, if for example it’s about speed then the weights should represent the fastest moving time. Or if fuel cost efficiency needs to be considered, then shortest path needs to be designed with least costly pathways. In these kinds of scenarios, the weights, rather than straight lines become very relevant to find true optimal paths between the starting points to destinations.
Shortest Path Problem

Spatial Environments
Essentially the core problem is that we are trying to efficiently represent routes which allow optimal or most beneficial way to navigate networks, by choosing edges based on a selected and applicable criteria such as fastest travel times, shortest driving distance, most scenic roads or fuel efficiency and many other metrics can be accommodated as parameters. To properly model the issue a graph is defined with mathematical precision with set of vertices (or nodes), that define where we are in the space we defined and edges, which show the connection and cost between vertices. If we introduce a directionality in edges then the concept goes from Graph to the realm of Directed graph, this is useful to analyze complex networks, for example traffic flow, pipelines, and communications network.
- Vertices (Nodes): They signify specific points or locations (for instance: traffic stops, intersection points).
- Edges (Links or Arcs): These depict direct connection routes between vertices (roads, railways).
- Weights: Attributes associated with edges, such as distance, travel time, and other cost related parameters that give an appropriate context for network design based on your priorities (speed, money or convenience.)
Methods to Finding the Optimal Paths:
We can implement various algorithm based on specific contexts to resolve shortest-path problems and each has its specific use based on criteria such as graph size and weights type involved with different considerations for each technique. Here are few examples of most known algorithms to find the shortest path:

Dijkstra’s Algorithm: A Foundation in GIS Route Optimization
A classic and widely-used algorithm to tackle shortest path issues on single point of origin graphs with no negative edge weights is Dijkstra’s Algorithm. Here’s the approach this ingenious algorithm employs :
- Start at an assigned origin vertex.
- Mark the vertices’ tentative distances, and at the starting point is ‘zero’, others to ‘infinity’.
- Pick out the vertex closest to current vertex that has not yet been traversed.
- Update the distances of vertices neighbor of that picked out point through comparison with available data, using cost/weight that shows how they relate to each other and keep minimum values to the neighbour.
- The processes is repeated by choosing the next shortest distances till destination vertex is marked traversed. The strength of this method comes from it being highly efficient to identify the lowest cost pathway from an original point to one single final destination but is constrained because it has no negative edge-weights that cause inconsistencies.
- Suitable Use Cases: Route planning that is highly reliable, path calculation of GPS tools, traffic modelling and vehicle tracking and many other.

Bellman-Ford Algorithm: Complex Networks With Negative weights
For more generalized contexts such as transportation system analysis and any route optimization applications that involve variable transit weights based on conditions such as weather conditions, time constraints or capacity concerns and those having complex directed graphs which includes paths with a variety of factors; an algorithm known as Bellman-Ford Algorithm, stands ready. Here’s a high-level view into how Bellman-Ford addresses this difficult issue:
- Start by assigning tentative cost values to all points and ‘0’ to origin.
- Evaluate and ‘relax’ edges by repeatedly relaxing those values which are shortest and connected through a path until reaching a value representing true ‘lowest’ distance.
- With relaxation process we iterate for number of points involved minus 1 steps in case of graph containing n nodes and n-1 maximum edges involved.
- Negative cycles and their validity are checked and reported by the final round of computation.
The important point to consider here is its ability to recognize presence of ‘negative weights cycles’, such cycles may influence incorrect calculation for distance that would continue decreasing infinitely. This flexibility and sensitivity towards various constraints or properties, make this algorithm effective for the applications that cannot avoid complexities and variable condition during planning or simulations.
- Suitable Use Cases: network reliability analysis, risk assessment, path calculation with varying constraints
A* Search Algorithm: Optimization in Geographic Spaces
This A* search method is another approach that goes far beyond Dijkstra in providing an optimized solutions particularly useful in path-finding applications that have large amounts of nodes that could make any systematic search of entire solution very time consuming . This efficiency is gained by incorporating a heuristic that help algorithm navigate towards optimal direction with better focus. Steps involved are as follows.
- Begin by analyzing paths between ‘origin and destination’ in a way using their actual value added with an assumed approximation using some criteria (e.g. linear distance).
- At each position, analyze the adjacent points based on its existing path and their cost toward end destination.
- Continue the iteration by choosing paths based on ‘total’ evaluated value, which guides algorithm toward the potential ‘best direction’.
Using a heuristic helps in guiding the algorithmic path towards best possibility thereby increasing performance significantly but also involves complex decision. Heuristic used can affect whether that path is indeed optimal and therefore that criteria needs careful analysis of what are we attempting to accomplish, what is relevant and effective for a scenario is required.
- Suitable Use Cases: Urban navigation applications, mobile devices needing optimized directions , real-time route alterations.
Shortest Path algorithms and GIS : Practical insights
While the algorithms provide mathematical framework, GIS systems bring that framework into real-world application and user experiences .
- GIS Software Integration: Major GIS software platforms such as ArcGIS, QGIS and PostGIS etc offer libraries to create routing functions from your own local dataset with customized parameters based on need, and various methods available for implementation.
- Real-world Considerations: Implementation of graph algorithms usually involve real road networks from OpenStreetMap, satellite datasets and/or survey datasets that need pre-processing, that make data suitable for analysis including network connectivity, the weights such as distance, speed restrictions or road traffic condition
- Spatial databases: the spatial information is stored as layers (geometries) and attributes that have data of points, lines and area feature classes and SQL queries can be implemented on it, including spatial analysis algorithms, network topology, as a well-defined environment which simplifies both calculation and presentation, helping implement most suitable methodology.
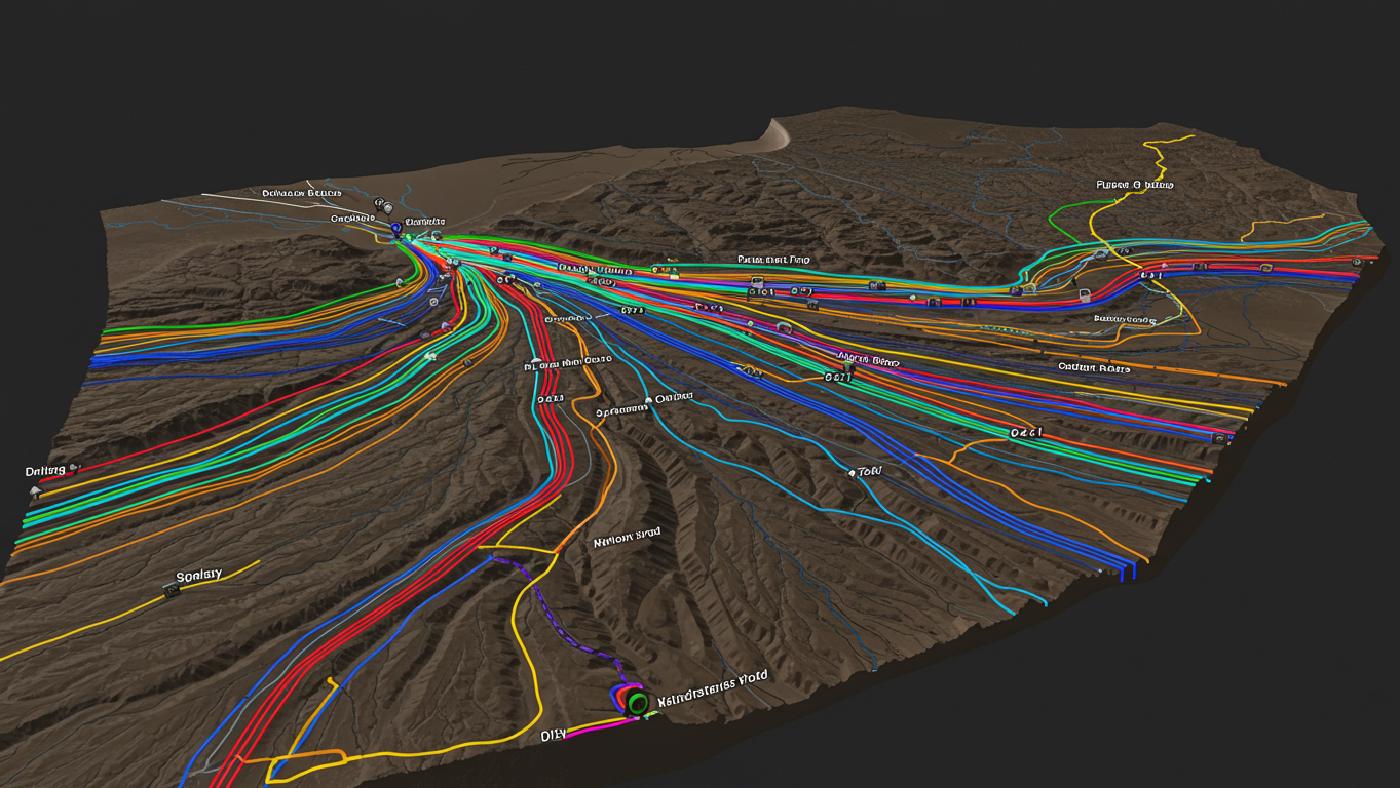
- Visualization: One key strength of GIS that adds visual layer for analysis include tools to visually represent graph routes with ability to use varying colors and thickness for edges for making a meaningful distinction and user experience for complex networks, for analysis or decision support.
- Limitations : Simplifications based on ideal assumptions are inherent characteristics in every method used and hence should not be ignored during results’ evaluations, parameters such as traffic variations based on season or unpredictable road closures and detours can affect the results from being practically achievable so the real applicability may not be exactly same as the expected from the model.

Concluding Remarks on Optimizing Your Path With Spatial Technology.
The shortest path problem isn’t a mere abstract math exercise – it has an impressive influence on geographic modeling and data driven decision-making in almost all geospatial applications, such as finding optimal transit routes in urban transport and real-time direction and navigations for delivery, or emergency rescue management to identify most useful transit ways. In our complex world, graph-theory-backed algorithms offer pragmatic approaches for the path calculations that impact millions of users all over the world. A full mastery and understanding of them would help to get valuable insights from your applications to make wiser, more strategic choices that helps make us reach point-B faster and in a more efficient and strategic way!